Gần đây có một số ae làm AGV nhưng đang không biết lựa chọn động cơ nào cho phù hợp nên mình mạn phép chia sẻ một số thông tin về các loại động cơ phù hợp để làm AGV
Đầu tiên các yếu tố để chọn động cơ là gì ? Với mình thì có mấy thông số sau :
– Điện áp
– Tốc độ
– Tỉ số truyền của hộp số
– Mômen đầu trục
– Công suất động cơ
– Có Driver chính hãng đi kèm hay không ?
Thường thì hầu hết chỉ để ý đến công suất mà quên mất kiểm tra lại mô men , 2 con động cơ thông số công suất giống nhau nhưng chưa chắc mô men bằng nhau và việ c để đảm bảo động cơ nó có chạy đủ mô men như thông số thì phụ thuộc rấ t nhiều vào cái driver mà hãng nó cung cấp , ko phải là driver xịn chạy với động cơ nào cũng được đâu .
Mọi người có thể tham khảo cái bảng exel mình gửi kèm , bảng này là cách tính nhanh dựa trên các công thức vật lý cơ bản thôi ko có gì quá cao siêu cả, nếu có điều kiện thì nên tính chi tiết bằng matlab , vì ngoài các thông số trên bảng còn rất nhiều yếu tố khác như : trọng tâm khối hàng , kích thước AGV , vector vận tốc , độ bám nền , rồi lực cản không khí cũng có nhé … rất nhiều thông số ảnh hưởng. Ở đây mình chọn 2 bộ 100w và đường kính bánh 150 mm , tại sao lại 100w vì khi vào cua thì sẽ có lúc có 1 bên động cơ chạy thôi , tại sao là 150mm vì tốc độ đi bộ trung bình của 1 người khi làm việc chỉ khoảng 2km/h .

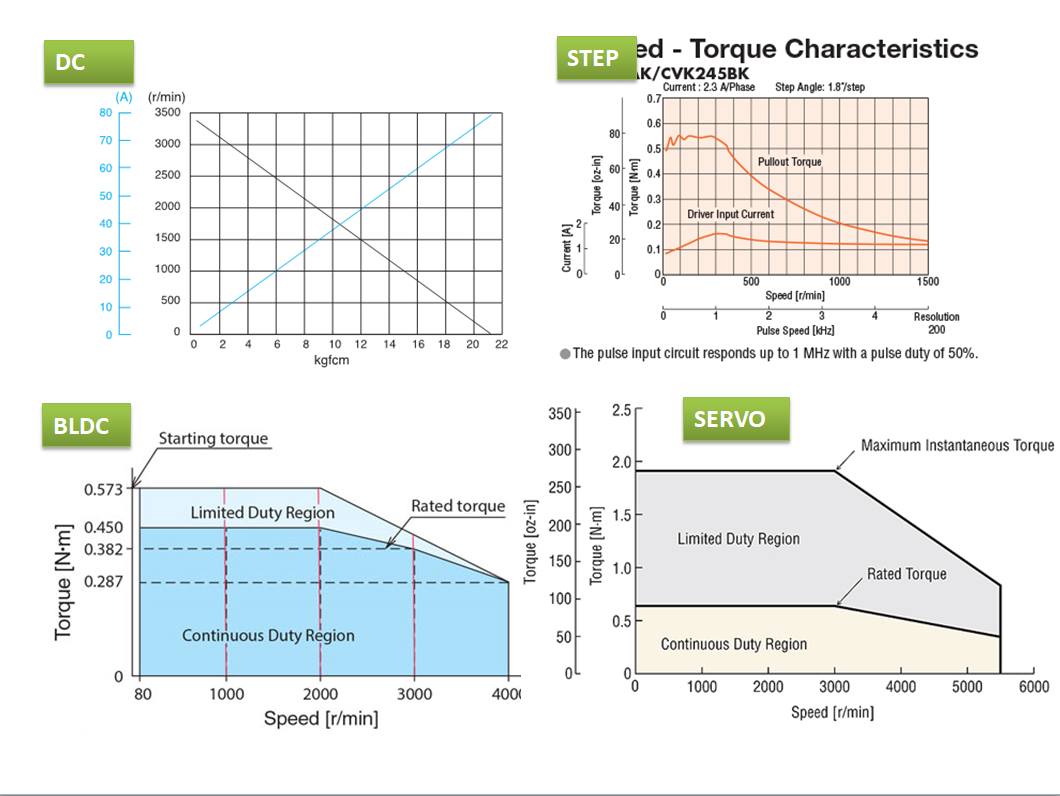
Tiếp theo là loại động cơ , mỗi một loại có ưu nhược điểm nhất định , mình mới được sử dụng 1 số loại BLDC , DC , STEP , SERVO ở đây mình xin phép chỉ đánh giá ở trên phương diện sử dụng cho AGV thôi nhé , mọi người có thể bổ xung . Mình có đưa ra 4 cái giản đồ vận tốc và mô men ở ảnh dưới.
DC , biểu đồ mô men đi xuống , tốc độ càng cao , mô men càng giảm , dòng càng cao . Tốc độ và mô mem đạt được khá cao
Step : Mô men đạt max được khoảng 600rpm , tốc độ cao mô men giảm sâu .
BLDC : Mô men ổn định ở giải tốc 2000rpm , giảm khi gần max
Servo : Giống BLDC nhưng tốc độ max cao hơn
Như vậy thì nó liên quan gì đến việc di chuyển của AGV ? Nếu như dò đường , mô men càng cao thì đi khả năng chịu tải càng tốt , điều chỉnh PID sẽ dễ hơn , khi tốc độ cao lên mô men nếu không đủ thì khó bẻ lái agv đi đc hoặc ko bẻ lái được luôn . Vậy nên tùy ứng dụng mà lựa chọn :
VD : Tốc độ chậm , cần tải nặng thì chọn DC . cần chính xác thì chọn Step . Tốc độ cao tải trung bình thì chọn BLDC , tải nặng , cần chính xác thì chọn servo ( AC servo thì dùng inverter đổi DC về AC để dùng , hoặc DC servo) . Nhìn chung về kích thước thì DC , BLDC to hơn Step và Servo tương đương . Giá thành thì DC và Step rẻ hơn BLDC và Servo tương đương .
Thông dụng nhất ở TQ , HQ , NB , TL và VN là động cơ DC và BLDC , ac servo à step dùng khá ít.
Mình thấy hiện giờ các bạn đã làm robocon ra làm AGV rất nhiều và mang tư tưởng của roboconer vào công nghiệp , Việc đó hết sức là nguy hiểm vì có mấy lý do sau : 1 trận robot chỉ có 3 phút là max , lỗi thì reset ko giới hạn , chỉ cần chạy nhanh , nhưng trong công nghiệp thì ổn định và an toàn được đặt lên đầu , tốc độ chậm thì có thể deal được với khách nhưng lỗi thì ko . 1 con robot tự động thì 40 kg là max và chạy trong phạm vi 14x14m là hết nhưng AGV chạy trong cả nhà máy , có người đi lại và nhẹ thì cũng phải 80kg chưa kể hàng , đi tốc độ cao hoàn toàn có thể đâm gãy chân được , đen thì đỏ hàng chết người , xảy ra chỉ 1 lần thôi là ko bao giờ có thể reset được , mang AGV về ,trả tiền và bồi thường , cấm thầu vĩnh viễn , các bạn tự tin vào cảm biến an toàn nhưng thức tế nó có hàng trăm yếu tố gây nhiễu , nên quên hãy cẩn trọng 1 vạn 9 nghìn lần nữa khi làm nhé . Chúc mọi người thành công!